
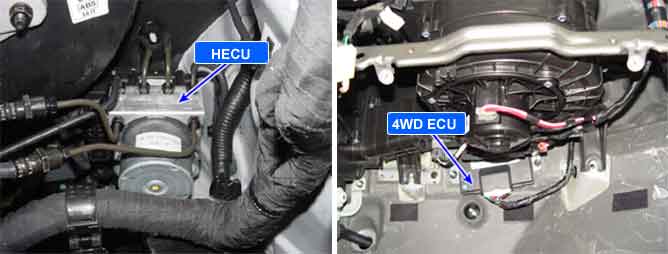
The HECU interchanges requirement data with the 4WD ECU through CAN bus line for normal ABS control.
For example the HECU sends a control inhibition signal to 4WD ECU for normal ABS control in case of the ABS and 4WD control requested at the same time such as wheel speed difference between front and rear wheel generated due to wheel slip.
The HECU checks the CAN communication lines for normal ESP control, and sets this code if re-initialization is tried for 15 times in sequence without success.
Item | Detecting Condition | Possible cause |
DTC Strategy |
•
Open or short monitoring |
•
Open or short circuit in CAN line
•
Faulty HECU |
Monitoring Period |
•
Continuous | |
Enable Conditions |
•
A CAN BUS off fault is established if re-initialization is tried for 15 times in sequence without success. | |
Fail Safe |
•
- |