
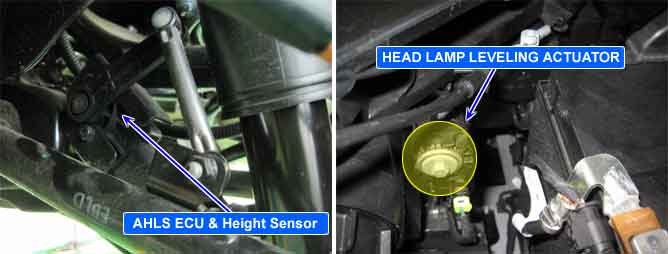
AHLS provides driver with the best visibility by adjusting vertical direction of the headlamp. It consists of ECM, Linkage and actuator. The ECM detects the vehicle speed to use it a compensation factor for the actuator control. In other words, when the vehicle speed is low the acutator needs to repond slowly though the linkage of height sensor moves quickly ( reponse filter value is high ) .But when the vehicle speed is high, ECM operates the actuator quickly in proportion to the height sensor variation.
The ECM sets DTC C1212 if the speed signal line carries a higher frequency than defined maximum value(approx. 420Hz) for 2 seconds.
Item | Detecting Condition | Possible Cause |
DTC Strategy |
•
Frequency check |
•
Poor connection
•
Faulty Vehicle speed sensor
•
AHLS-ECM faulty |
Detecting mode |
•
When vehicle is driving | |
Threshold Value |
•
Frequency >420Hz | |
Detecting time |
•
2 Sec |
Fig.1) It shows Signal waveform at driving condition that changes frequncy according to vehicle speed - 6km/h
Fig.2) It shows Signal waveform at driving condition that changes frequncy according to vehicle speed - 10km/h