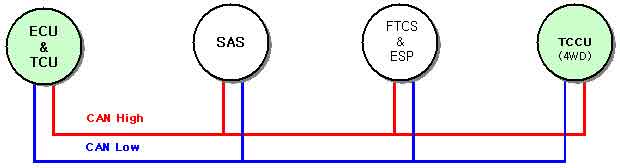
CAN communication is a parallel circuit to interchange information among each units. CAN communication can share much information with units more faster and more efficiently by using specified language.
CAN-High line is twisted with CAN-Low line as a purpose in preventing from a noise.
The operating duty of EMC is maintained at 100 : 0 (2WD) for guaranteeing stabilized driving force, accuracy of the control during inside ABS, FTCS, ESP control.
This code related to communication line between ECU(ESP) and TCCU is set when CAN signal from ECU can’t received for more than 1sec or ECU internal error occur.
If failure is detected TCCU prohibits the ITM control.
If failure is detected ITM-ECU prohibits the ITM control and cuts the current to control coil.
Item | Detecting Condition | Possible Cause |
DTC Strategy | ● ESP-ITM Communication Line, or ECU side malfunction | ● CAN HIGH/LOW circuit open/short. ● Faulty ESP. ● Faulty TCCU. |
Enable Conditions | ● Message present 1.0 sec self clearing | |
Threshold Value | ● Loss of the Wheel Speed sensor signals for greater than one (1) second, and a fault will be set | |
Diagnostic Time | ● 1 sec | |
MIL on condition | ● 0.5 Sec. | |
Fail Safe | ● See Speed Sensors. |