
LIN technology is , a serial communication system which is used for communicating only one signal, developed to substitute CAN network, Normally used for multi signal communiction. It is only single wire to make LIN communiction in order to make simple network that is not important speed. ECM receives battery infromation such as battery voltage, current and temperature etc.) through the LIN, and uses these data as a information for controlling the battery status and charge.
U1112 is set when checksum error during LIN communication, communication frame error, parity bit error and data over flow occurs.
Item | Detecting Condition | Possible Cause | ||
DTC Strategy |
•
Signal monitoring |
•
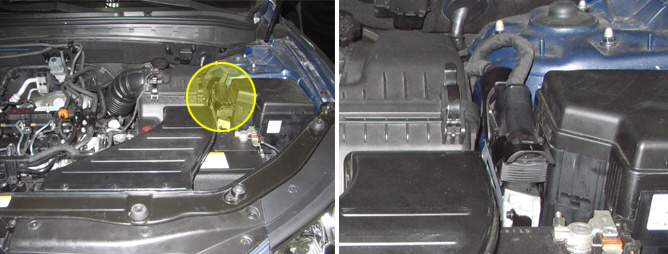
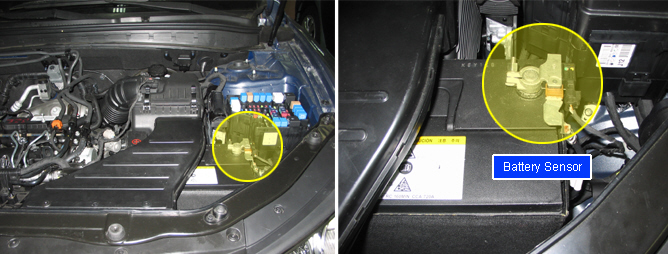
Each module communicated by LIN (battery sensor, etc.)
•
ECM | ||
Enable Conditions |
•
IG key "ON" | |||
Threshold value |
•
LIN Communication error
•
LIN Communication Frame structure error
•
LIN Head time Out error
•
LIN Message Over run (too much message transit for a given time)
•
LIN Communication parity error ※ parity bit (odd,even check bit) | |||
Diagnosis Time |
•
1 sec | |||
Fail Safe | Fuel cut | NO | ||
EGR Off | NO | |||
Fuel Limit | NO | |||
Check Lamp | OFF | |||
Fig.1) Bettery sensor LIN Communication signal waverform at idle.
- Transmission --> Hi : 80% of B+, Low : 20% of B+
- Receipt --> Hi : 70% of B+, Low : 30% of B+