
LKAS is a device that maintains the vehicle within a lane by detecting the lane via a camera, calculating the vehicle position and the steering force required to keep the vehicle running in the center of the lane, and controlling the vehicle accordingly. The system consists of a LKAS unit, cluster, MDPS and power switch. LKAS uses yaw rate and horizontal G-sensor acceleration values to control the steering force, keeping the vehicle running in the center of a lane.
If the yaw rate and horizontal acceleration signals are not received via CAN lines, the LKAS module generates the fault code C128386 and turns on the Malfunction Indicator Lamp.
Item | Detecting Condition | Possible Cause |
DTC Strategy |
•
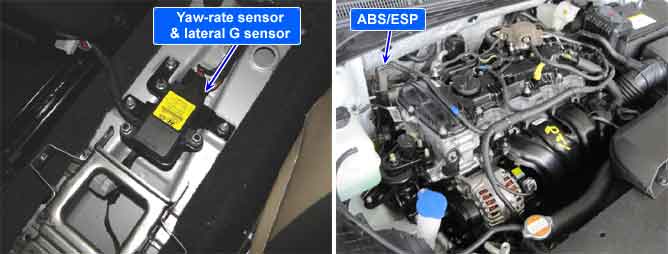
Detect a CAN communication signal | 1. Poor contact with a connector 2. Open or short-circuited CAN communication line 3. yaw-rate and lateral G sensor 4. ABS/TCS/ESP Module |
Enable Conditions |
•
If the vehicle speed is 50Km/h or faster when IG is “ON” or the engine is “ON” | |
Threshold Value |
•
If, in the ESP2 message, the horizontal acceleration signal is received for 0.01 second or longer, or the yaw rate signal is received for more than 3 times | |
Diagnostic Time |
•
Immediately |