
The ratio monitoring controls the nominal gear box ratio to the real gear box ratio. While driving in a gear(reverse, first second, third…) there is a calibrated rationality check between turbine speed and output speed of the corresponding gear.While up or down shifting from one gear to another there is a calibrated rationality check between turbine speed and output speed of the corresponding shift. While engaging the gear there is a calibrated rationality check between turbine speed and output speed of the corresponding shift if the actual output speed is higher or equal than a calibrated threshold.While engaging the gear when the actual output speed is lower than the threshold there is a rationality check on the turbine speed.
TCM set this code If detected not properly operation of "Brake C" in 2nd and 6th gear.(MIL ON : 2 driving Cycle)
Item | Detecting Condition | Possible Cause | |
DTC Strategy |
•
Check function (2nd and 6th gear) |
•
Check Engine system
•
E- Module
•
Replace ATM | |
Enable Conditions |
•
ATF temperature > 0℃.
•
Engine speed > 400rpm.
•
Input speed > 0rpm.
•
Input speed : normal.
•
Inhibitor s/w : Not "P or N" position.
•
Within 0.5 second after shift. | ||
CASE 1 |
•
Output speed ≥ 50rpm | ||
CASE 2 |
•
Output speed < 50rpm | ||
Threshold Value | CASE 1 | Not shifting and not engaging status
•
Actual gear ratio > Target gear ratio
•
Actual gear ratio < Target gear ratio | |
CASE 2 | Not shifting and not engaging status
•
(Output speed * gear ratio) - Input speed > 320rpm | ||
Diagnostic Time |
•
3times function check | ||
Fail Safe |
•
Fixed at 4th gear
•
No learning control (Priority : 3) | ||
The function with the higher priority will aiways take precedence. However, a low-priority is not overruled by a higher priority function.
Functions from different priority categories can also run in parallel. It is important to note which function will take precedence in this case.
In such an event it is possible for a substitute function with low priority not be carried out if a second, higher-priority function is present. This has been taken into account when compiling the priority list and is international.
The mechanical emergency run function must always have the highest priority, since from the electrical standpoint it is the only safe condition.
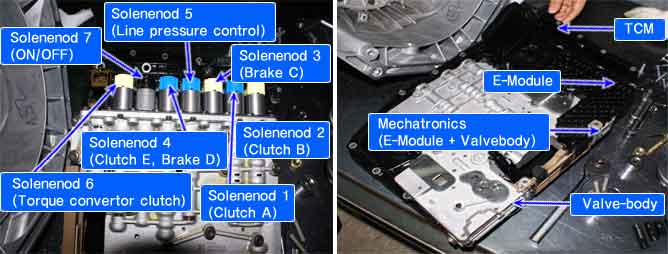
Fig 1) Shift control solenoid valve3