
Several control units are applied to electronically controlled vehicles. These units perform each control with informations from various sensors. Thus, sharing signal information from sensors is needed, so CAN communication type whose communication speed is high and insensitive to electrical noise by spark generation is adopted to controlling power-train(TCM, ECM, CLUSTER,VDC,4WD,EAS,SAS, EPS)
CAN communication consists of CAN BUS HIGH, CAN BUS LOW and two 120Ω resistances in circuit.
TCM set this code If not receive CAN message form ECM.(MIL OFF)
Item | Detecting Condition | Possible Cause |
DTC Strategy |
•
Check signal |
•
CAN communication line open of TCM side
•
CAN communication line short of TCM side
•
ECM
•
CLUSTER
•
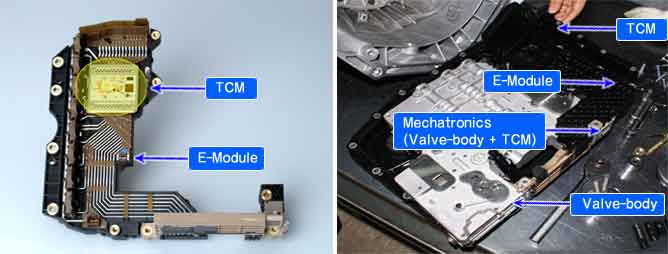
Mechatronics(E-module + Valvebody) |
Enable Conditions |
•
No error in CAN BUS
•
0.5 second after IG ON
•
Battery voltage > 9V | |
Threshold Value |
•
No message from ECM
•
Input Not available data | |
Diagnostic Time |
•
0.55 second | |
Fail Safe |
•
Maximum line pressure control (D : 14kg/㎠, R : 20kg/㎠)
•
Vehicle speed is subtituted wheel speed
•
Release "Shift lock"
•
Maintain present gear position at fault detecting.
•
Fixed at 3rd gear after stop
•
No control Torque convertor clutch
•
No learning control (Priority : 3) |